Description
AXIS#.VL.ARPQ1 sets the Q (quality factor) of the pole (denominator) of AR filter 1. This value is QP in the approximate transfer function of the filter:
ARx(s) = [s²/(2πFZ)²+s/(QZ2πFZ) + 1]/ [s²/(2πFP)² +s/(QP2πFP) + 1]
The following block diagram describes the AR filter function; note that AR1 and AR2 are in the forward path, while AR3 and AR4 are applied to feedback:
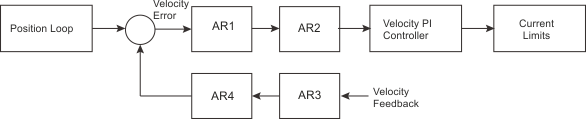
AR1, AR2, AR3, and AR4 are used in velocity and position mode, but are disabled in torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist mode.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist mode.
Discrete time transfer function (applies to all AR filters)
The velocity loop compensation is actually implemented as a digital discrete time system function on the DSP. The continuous time transfer function is converted to the discrete time domain by a backward Euler mapping:
s ≈ (1-z-1)/t, where t = 62.5 µs
The poles are prewarped to FP and the zeros are prewarped to FZ.
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
|
Type |
Read/Write |
|
Units |
None |
|
Range |
0.2 to 20 |
|
Default Value |
AXIS#.VL.ARPQ1: 0.707 VLARPQ2 to VLARPQ4: 0.5 |
|
Data Type |
Float |
|
Stored in Non Volatile Memory |
Yes |
Variants Supported
All variants are supported.
Fieldbus Information
| Fieldbus |
Parameter | Index | Sub-Index | Data Type | Float Scale | Units | Access | PDO Mappable |
|---|---|---|---|---|---|---|---|---|
| EtherCAT |
AXIS1.VL.ARPQ1 | 0x5011 | 0x14 | UDINT | 1000:1 | - | RW | False |
| AXIS1.VL.ARPQ2 | 0x5011 | 0x15 | UDINT | 1000:1 | - | RW | False | |
| AXIS1.VL.ARPQ3 | 0x5011 | 0x16 | UDINT | 1000:1 | - | RW | False | |
| AXIS1.VL.ARPQ4 | 0x5011 | 0x17 | UDINT | 1000:1 | - | RW | False | |
| AXIS2.VL.ARPQ1 | 0x5111 | 0x14 | UDINT | 1000:1 | - | RW | False |






